RemoteApi影片 <<
Previous Next >> gogs及Fossil建立
W16-Exam
所有檔案皆可在W16中下載
40823214教學
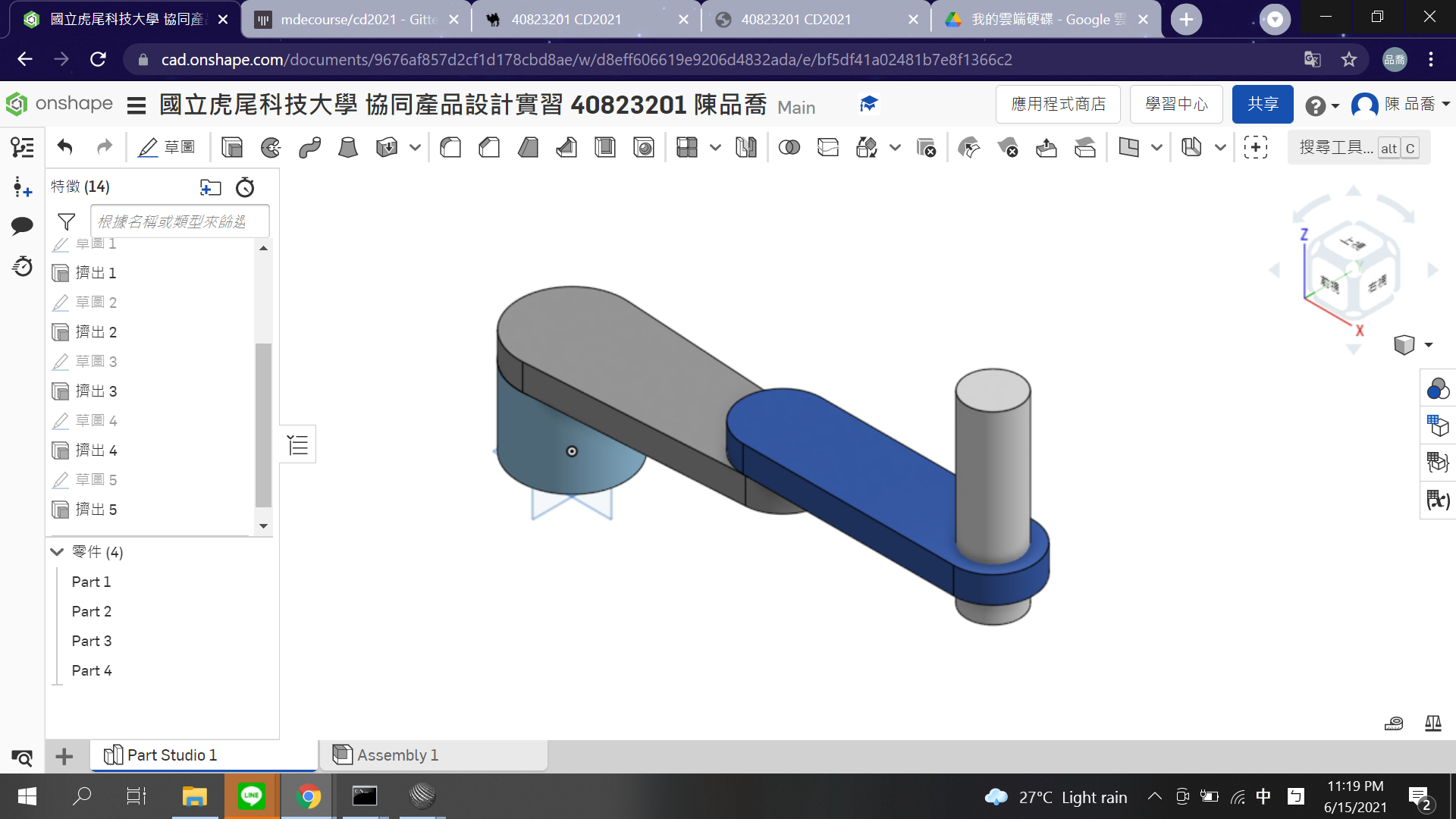
1.利用Onshape繪製MTB_Robot的零組件
零件繪製 / 零件下載
-------------------------------------------------------------------------------------------------------
2.建立CoppeliaSim 4.1.0 MTB robot 場景&末端加入Force sensor及suction pad
將繪製好的零件匯入CoppeliaSim中,完成軸的連接以及零件之間的子母關係。
檔案下載
-------------------------------------------------------------------------------------------------------
3.逆向運動學函式
角度計算公式參考40823214
迴圈檔案下載
function moving(x,y)
a=0.4
b=0.4
c=math.pow((math.pow(x,2)+math.pow(y,2)),0.5)
s=(a+b+c)/2 //海龍公式
area=math.pow((s*(s-a)*(s-b)*(s-c)),0.5)
h=2*area/c
deg1_base=math.atan(x/y)
if x<0 and y<0 then
deg1_base=deg1_base+math.pi //使角度落於180-270之間
end
deg1_tri=math.asin(h/a)
deg1=deg1_base+deg1_tri
deg2=math.pi-(0.5*math.pi-deg1_tri)-math.acos(h/b)
deg3=deg2-deg1
sim.setJointTargetPosition(joint01,deg1)
sim.setJointTargetPosition(joint02,-deg2)
sim.setJointTargetPosition(joint03,deg3)
end
function sysCall_threadmain()
joint01=sim.getObjectHandle('joint1') //定義軸的名稱
joint02=sim.getObjectHandle('joint2')
joint03=sim.getObjectHandle('joint3')
jointz=sim.getObjectHandle('jointz')
sim.setJointTargetPosition(joint01,0) //定義軸的初始位置
sim.setJointTargetPosition(joint02,0)
sim.setJointTargetPosition(joint03,0)
sim.setJointTargetPosition(jointz,0)
sim.setIntegerSignal("pad_switch",1) //給吸盤高電位
sim.setJointTargetPosition(jointz,-0.04) //移動至-0.4
sim.wait(3) //等待3秒
sim.setJointTargetPosition(jointz,0) //回到初始位置
while sim.getSimulationState()~=sim.simulation_advancing_adouttostopre do
moving(0.2,0.7)
sim.wait(3)
sim.setIntegerSignal("pad_switch",0) //給吸盤低電位
sim.wait(3)
sim.setIntegerSignal("pad_switch",1)
sim.setJointTargetPosition(jointz,-0.04)
sim.wait(3)
sim.setJointTargetPosition(jointz,0)
sim.wait(3)
moving(-0.3,-0.55) //移動至(-0.3,-0.55)
sim.wait(3)
sim.setIntegerSignal("pad_switch",0)
sim.wait(3)
sim.setIntegerSignal("pad_switch",1)
sim.setJointTargetPosition(jointz,-0.04)
sim.wait(3)
sim.setJointTargetPosition(jointz,0)
sim.wait(3)
end
end
-------------------------------------------------------------------------------------------------------
4.利用RemoteApi控制機械手臂
RemoteApi下載
import sim as vrep
import math
import random
import time
import math
def moving(x,y):
a=0.4
b=0.4
c=math.pow((math.pow(x,2)+math.pow(y,2)),0.5)
s=(a+b+c)/2
area=math.pow((s*(s-a)*(s-b)*(s-c)),0.5)
h=area/(2*c)
deg1_base=math.atan(x/y)
if x<0 and y<0 :
deg1_base=deg1_base+math.pi
deg1_tri=math.asin(h/a)
deg1=deg1_base+deg1_tri
deg2=math.pi-(0.5*math.pi-deg1_tri)-math.acos(h/b)
deg3=deg2-deg1
vrep.simxSetJointTargetPosition(clientID,joint01,deg1,opmode)
vrep.simxSetJointTargetPosition(clientID,joint02,-deg2,opmode)
vrep.simxSetJointTargetPosition(clientID,joint03, deg3,opmode)
print ('Start')
vrep.simxFinish(-1)
clientID = vrep.simxStart('127.0.0.1', 19997, True, True, 5000, 5)
if clientID != -1:
print ('Connected to remote API server')
res = vrep.simxAddStatusbarMessage(
clientID, "40823201 ",
vrep.simx_opmode_oneshot)
if res not in (vrep.simx_return_ok, vrep.simx_return_novalue_flag):
print("Could not add a message to the status bar.")
opmode = vrep.simx_opmode_oneshot_wait
STREAMING = vrep.simx_opmode_streaming
vrep.simxStartSimulation(clientID, opmode)
ret,joint01=vrep.simxGetObjectHandle(clientID,"joint1",opmode)
ret,joint02=vrep.simxGetObjectHandle(clientID,"joint2",opmode)
ret,joint03=vrep.simxGetObjectHandle(clientID,"joint3",opmode)
ret,jointz=vrep.simxGetObjectHandle(clientID,"jointz",opmode)
vrep.simxSetJointTargetPosition(clientID,joint01,0,opmode)
vrep.simxSetJointTargetPosition(clientID,joint02,0,opmode)
vrep.simxSetJointTargetPosition(clientID,joint03,0,opmode)
vrep.simxSetIntegerSignal(clientID,"pad_switch",1,opmode)
vrep.simxSetJointTargetPosition(clientID,jointz,-0.04,opmode)
time.sleep(1)
vrep.simxSetJointTargetPosition(clientID,jointz,0,opmode)
while True:
moving(0.2,0.7)
time.sleep(1)
vrep.simxSetIntegerSignal(clientID,"pad_switch",0,opmode)
time.sleep(1)
vrep.simxSetIntegerSignal(clientID,"pad_switch",1,opmode)
vrep.simxSetJointTargetPosition(clientID,jointz,-0.04,opmode)
time.sleep(1)
vrep.simxSetJointTargetPosition(clientID,jointz,0,opmode)
moving(-0.3,-0.55)
time.sleep(1)
vrep.simxSetIntegerSignal(clientID,"pad_switch",0,opmode)
time.sleep(1)
vrep.simxSetIntegerSignal(clientID,"pad_switch",1,opmode)
vrep.simxSetJointTargetPosition(clientID,jointz,-0.04,opmode)
time.sleep(1)
vrep.simxSetJointTargetPosition(clientID,jointz,0,opmode)
-------------------------------------------------------------------------------------------------------
5.利用keyboard操控機械手臂
鍵盤檔案下載
按鍵代碼參考40823214
function sysCall_init()
joint01=sim.getObjectHandle('joint1')
joint02=sim.getObjectHandle('joint2')
joint03=sim.getObjectHandle('joint3')
jointz=sim.getObjectHandle('jointz')
sim.setJointTargetPosition(joint01,0) //定義軸的名稱
sim.setJointTargetPosition(joint02,0)
sim.setJointTargetPosition(joint03,0)
sim.setJointTargetPosition(jointz,0)
deg1=0 //定義初始角度為0
deg2=0
zhing=false
pad=false
end
function sysCall_actuation()
message,auxiliaryData=sim.getSimulatorMessage()
while message~=-1 do
if (message==sim.message_keypress) then
if (auxiliaryData[1]==119) then //W=119
deg1=deg1+1
sim.setJointTargetPosition(joint01,deg1*math.pi/180) //將角度換算成徑度
end
if (auxiliaryData[1]==115) then //S=115
deg1=deg1-1 //角度縮小
sim.setJointTargetPosition(joint01,deg1*math.pi/180)
end
if (auxiliaryData[1]==97) then //A=97
deg2=deg2+1 //角度加大
sim.setJointTargetPosition(joint02,deg2*math.pi/180)
end
if (auxiliaryData[1]==100) then //D=100
deg2=deg2-1
sim.setJointTargetPosition(joint02,deg2*math.pi/180)
end
if (auxiliaryData[1]==2008) then //方向鍵-下=2008
sim.setJointTargetPosition(jointz,-0.4) //使吸盤至-0.4
sim.setIntegerSignal("pad_switch",1) //給吸盤高電位
end
if (auxiliaryData[1]==2007) then //方向鍵-上=2007
sim.setJointTargetPosition(jointz,0) //使吸盤至0
sim.setIntegerSignal("pad_switch",1)
end
if (auxiliaryData[1]==32) then //Tab=32
sim.setIntegerSignal("pad_switch",0) //給吸盤低電位
end
sim.setJointTargetPosition(joint03,(deg2-deg1)*math.pi/180)
end
message,auxiliaryData=sim.getSimulatorMessage()
end
end
-------------------------------------------------------------------------------------------------------
心得:
這次的期末作業讓我確實的接觸到了CoppeliaSim,因為在這之前,模擬的部分都不是我負責的,頂多使用RemoteApi操控作業,所以都不能了解CoppeliaSim的操作,不過經過這次,我也了解到為什麼大家都說用完CoppeliaSim後發現英文的重要性,很感謝之前有認真學英文的我,在首次接觸到CoppeliaSim的情況下,沒什麼困難(還是有些沒看過的單詞,但是會去查),除了字太小以外...這學期首先要感謝的不外乎是老師的指導,也很感謝40823217(從Stage1到Stage3都跟我一組的組長)願意幫助我及指導我,以及40823210同學願意讓我把我高中的小願望當成主題,更精緻更完善的畫出來,還有感謝40823214同學的影片指導,讓我在程式方面較為熟悉。祝大家平平安安,去去疫情走!
RemoteApi影片 <<
Previous Next >> gogs及Fossil建立