bg2-W14&W15進度 <<
Previous Next >> RemoteApi影片
task3-RoboDK
利用RemoteApi操控六軸機器人
參考40823202
操作者:40823201
先下載RoboDK 5.2.2 可攜程式及Pick and Place 檔案
下載完解壓縮至隨身碟
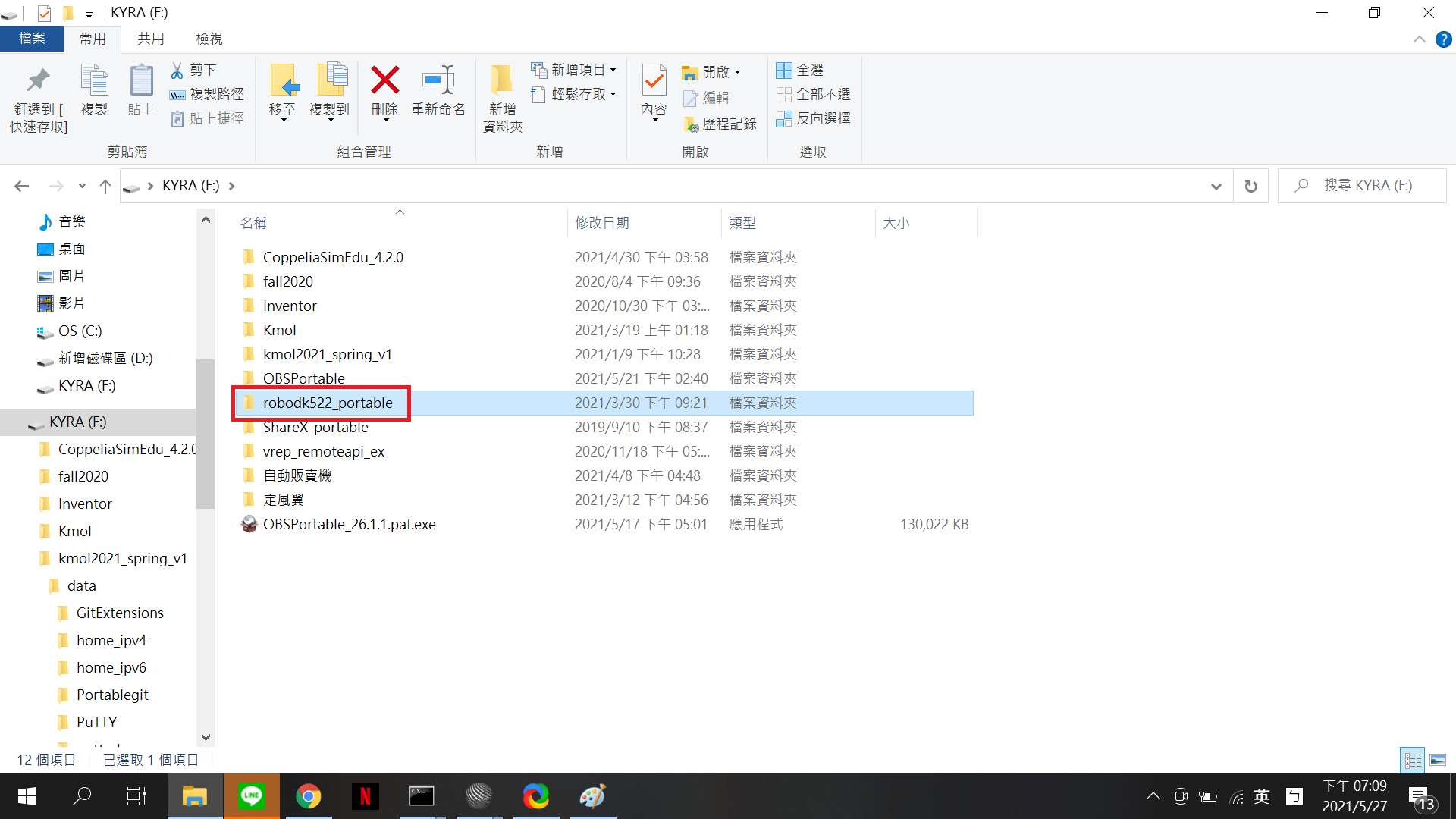
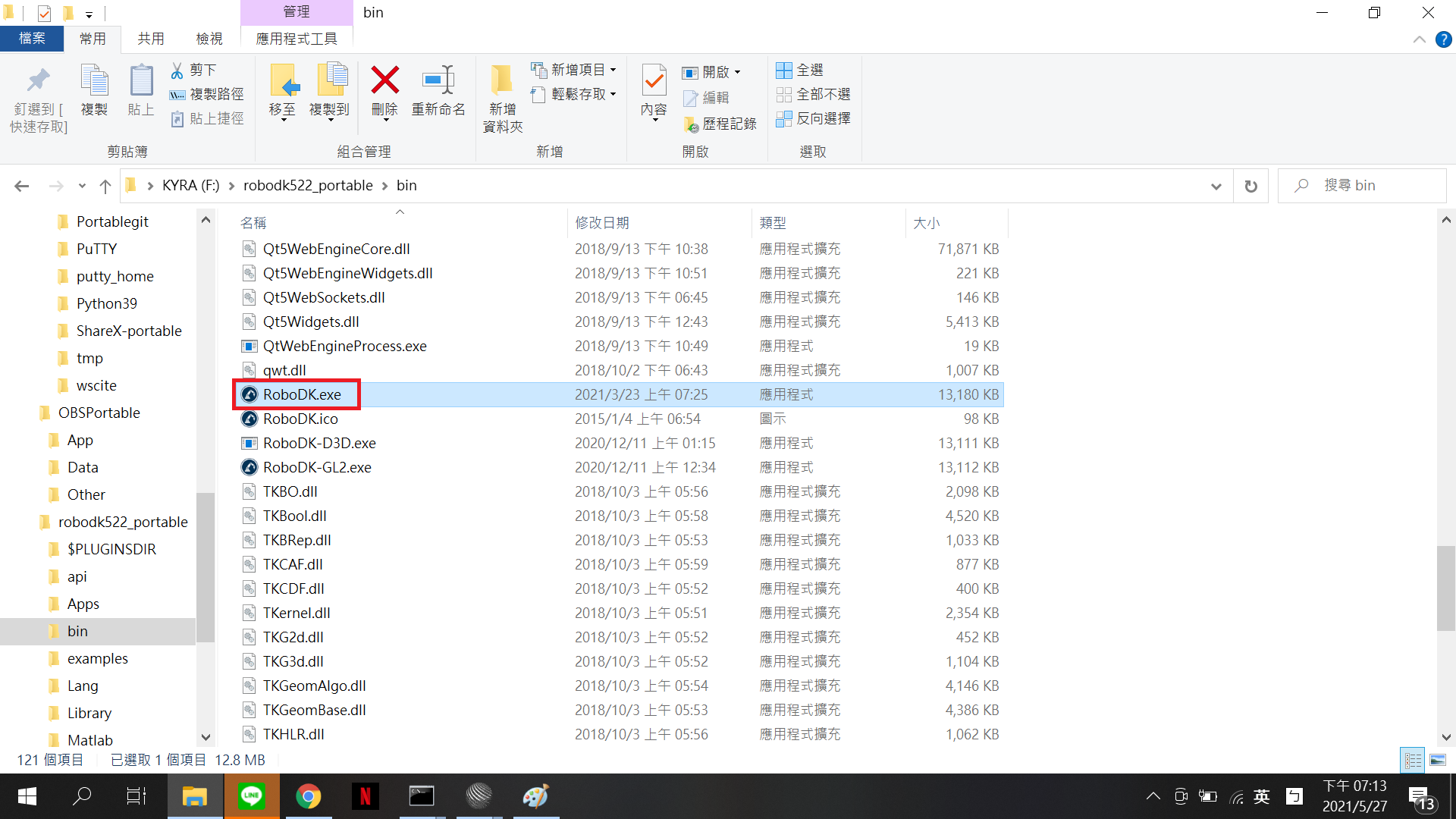
執行RoboDK.exe
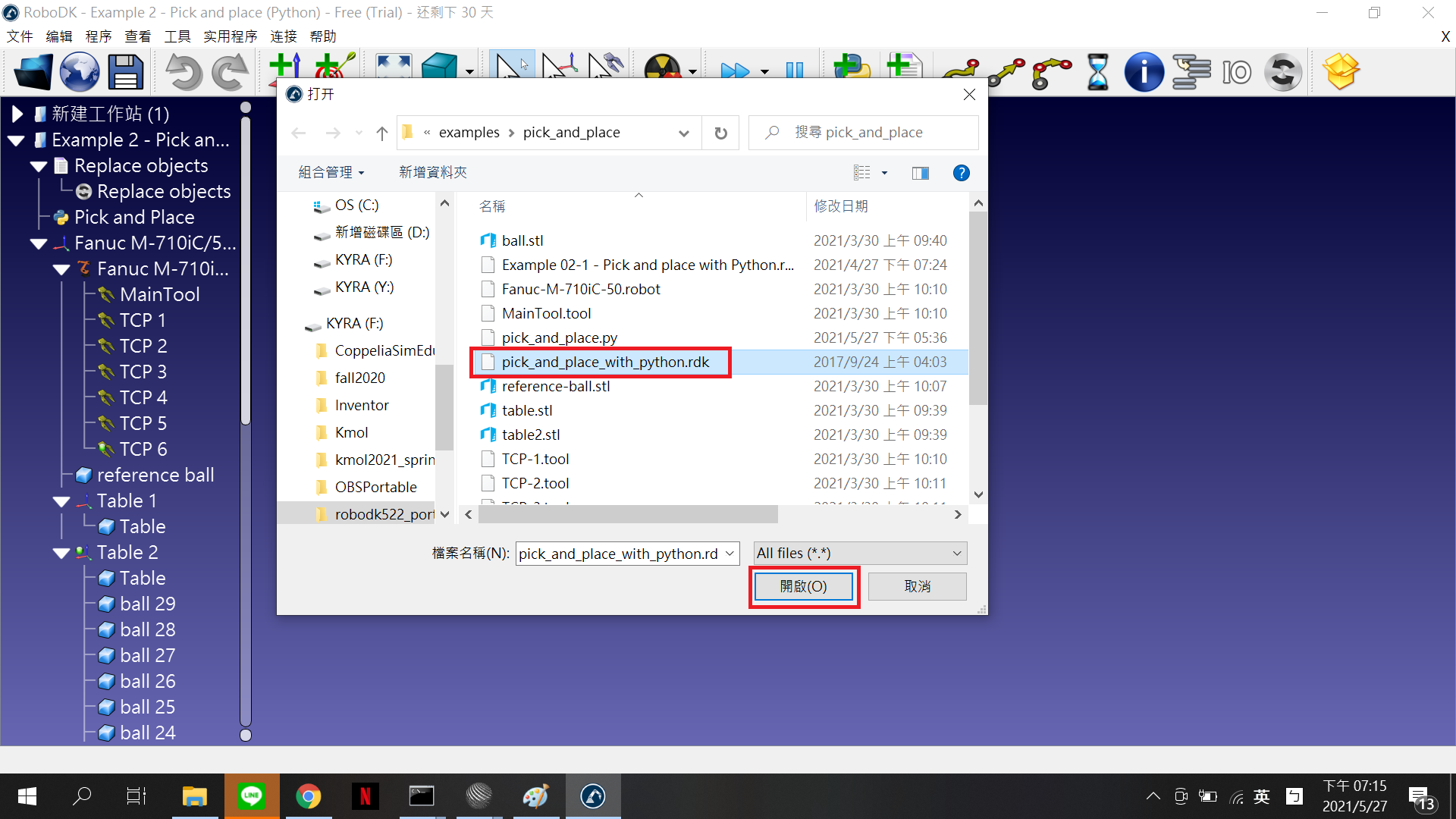
文件->打開->點選pick_and_place_with_python.rdk
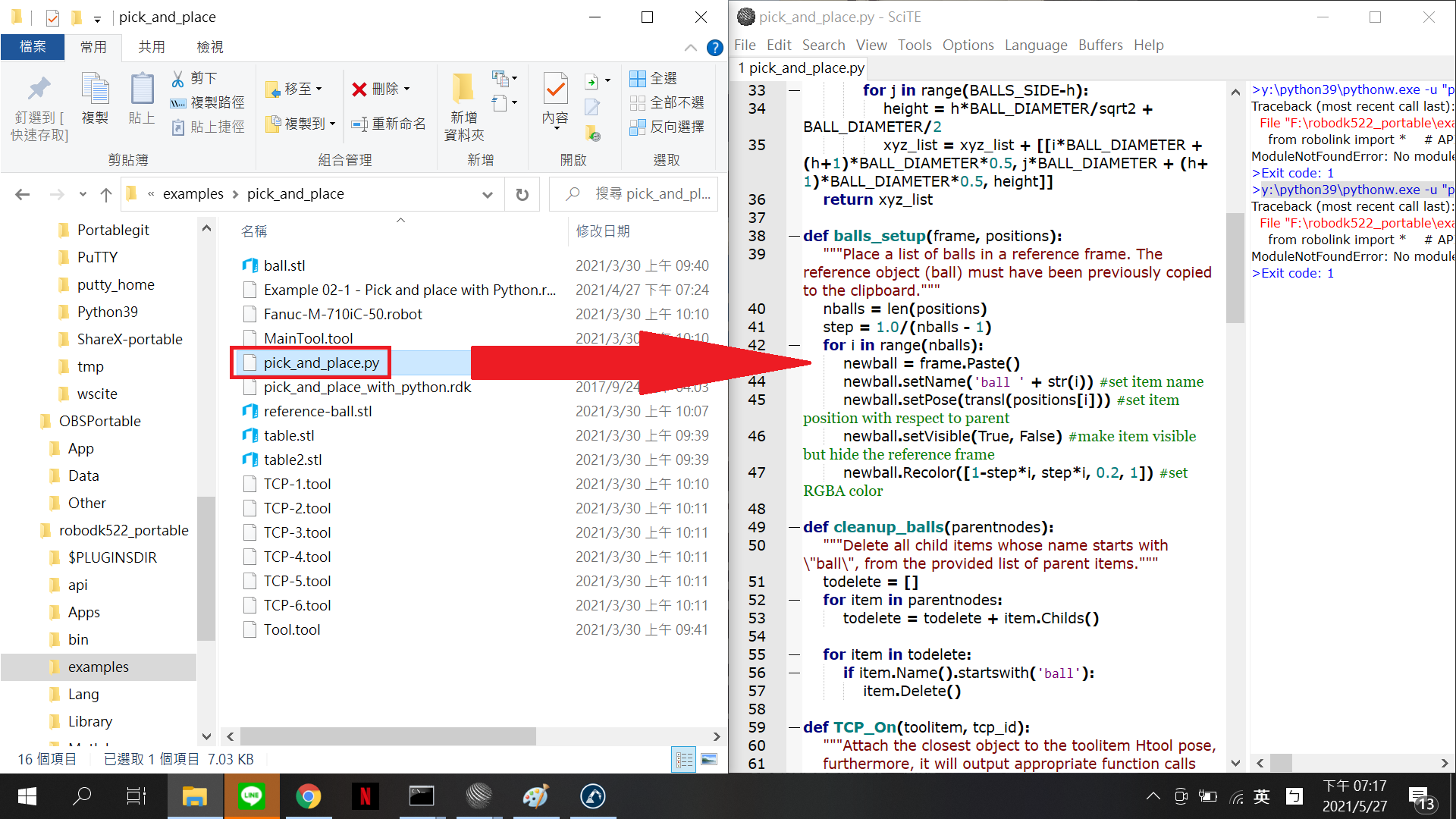
然後打開SciTE並將pick_and_place.py拖拉至SciTE
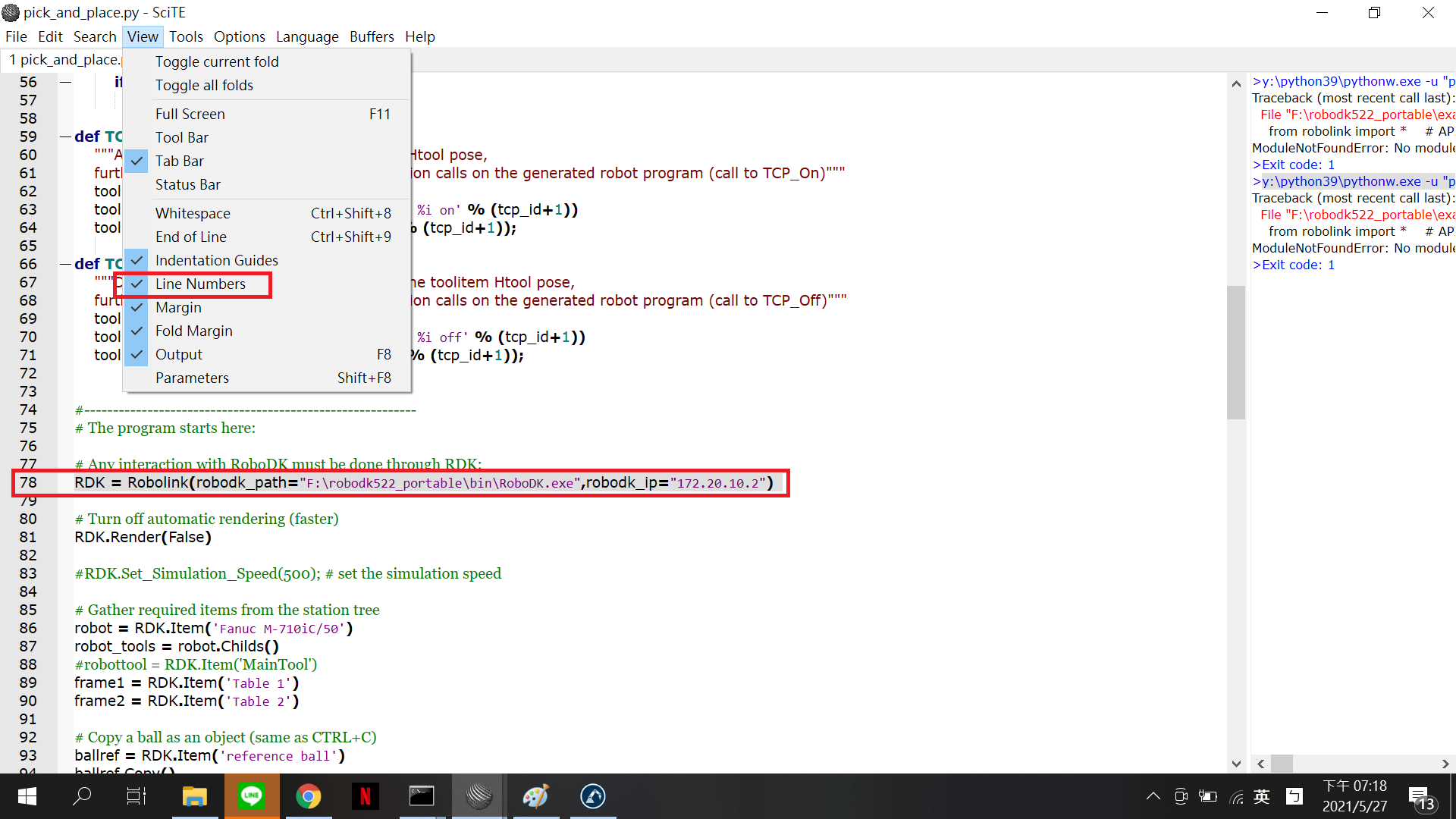
打開顯示數字行列,並找到第78行
(robodk_path指RoboDK.exe的路徑)
(robodk_ip指API的IP位置)
*找IP
回到RoboDK點選工具列最底層的選項

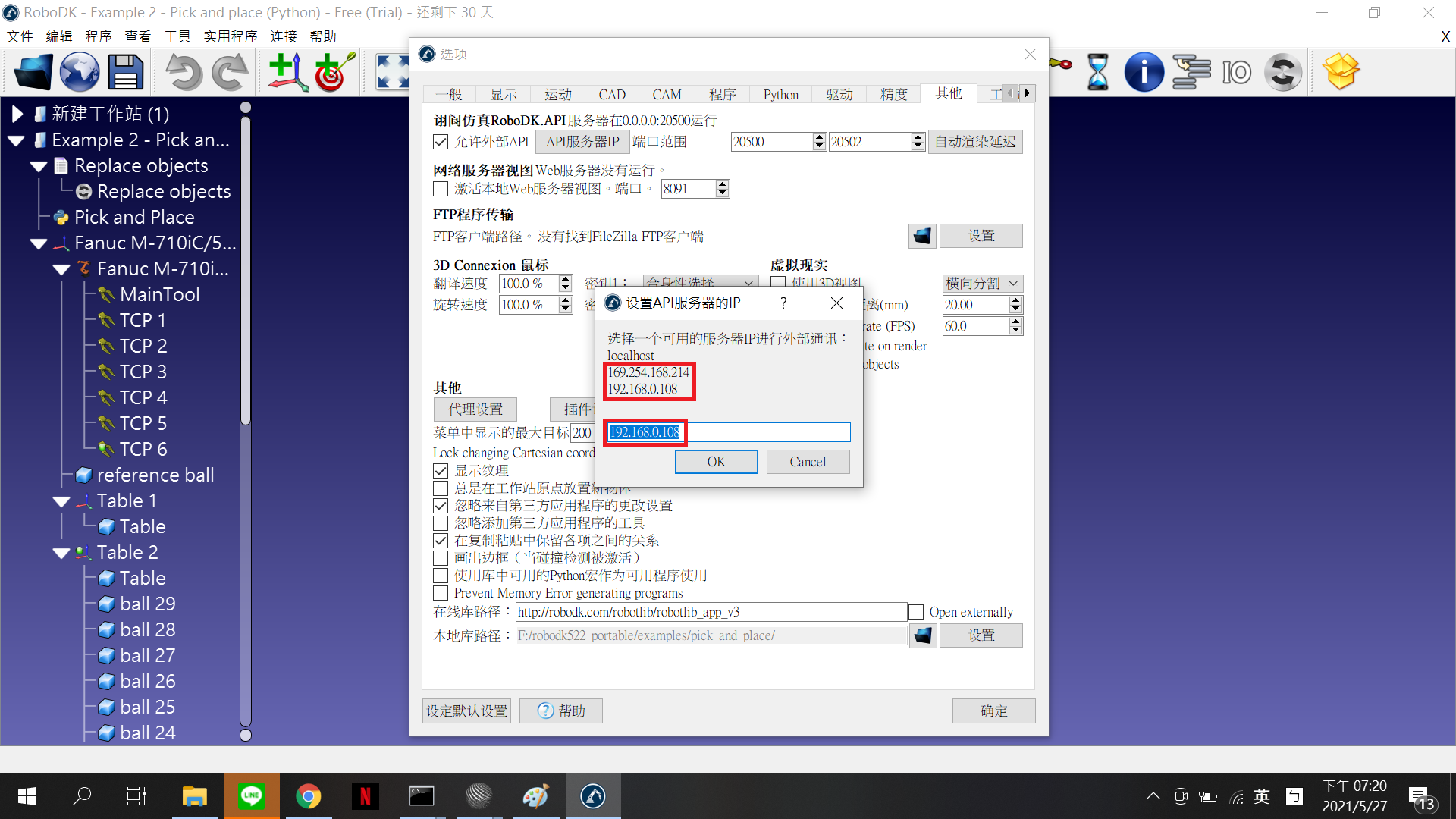
其他->勾選"允許外部API"->點選"API服務器IP"
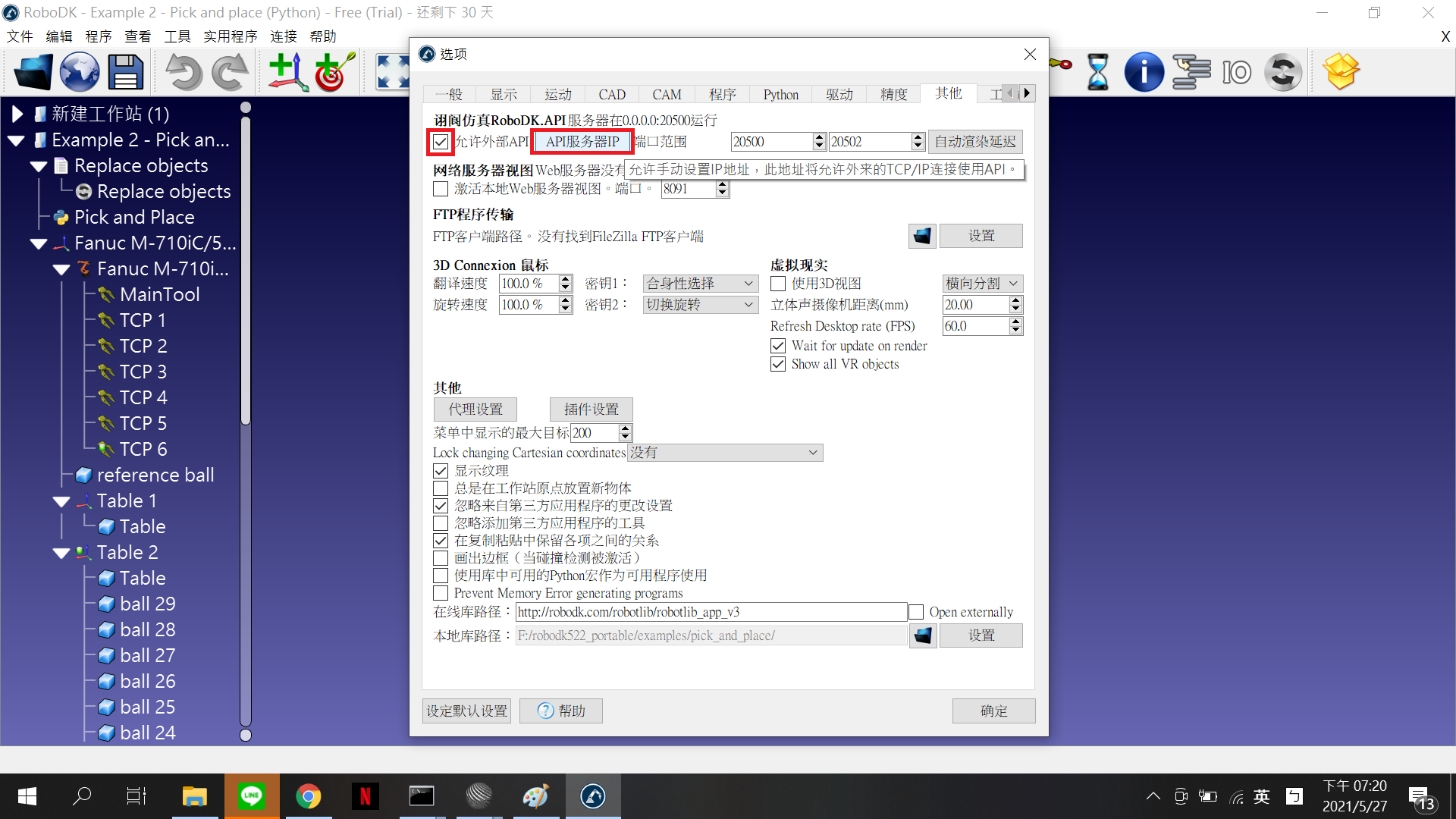
選取IP輸入下方欄位並複製->OK->回到SciTE貼上
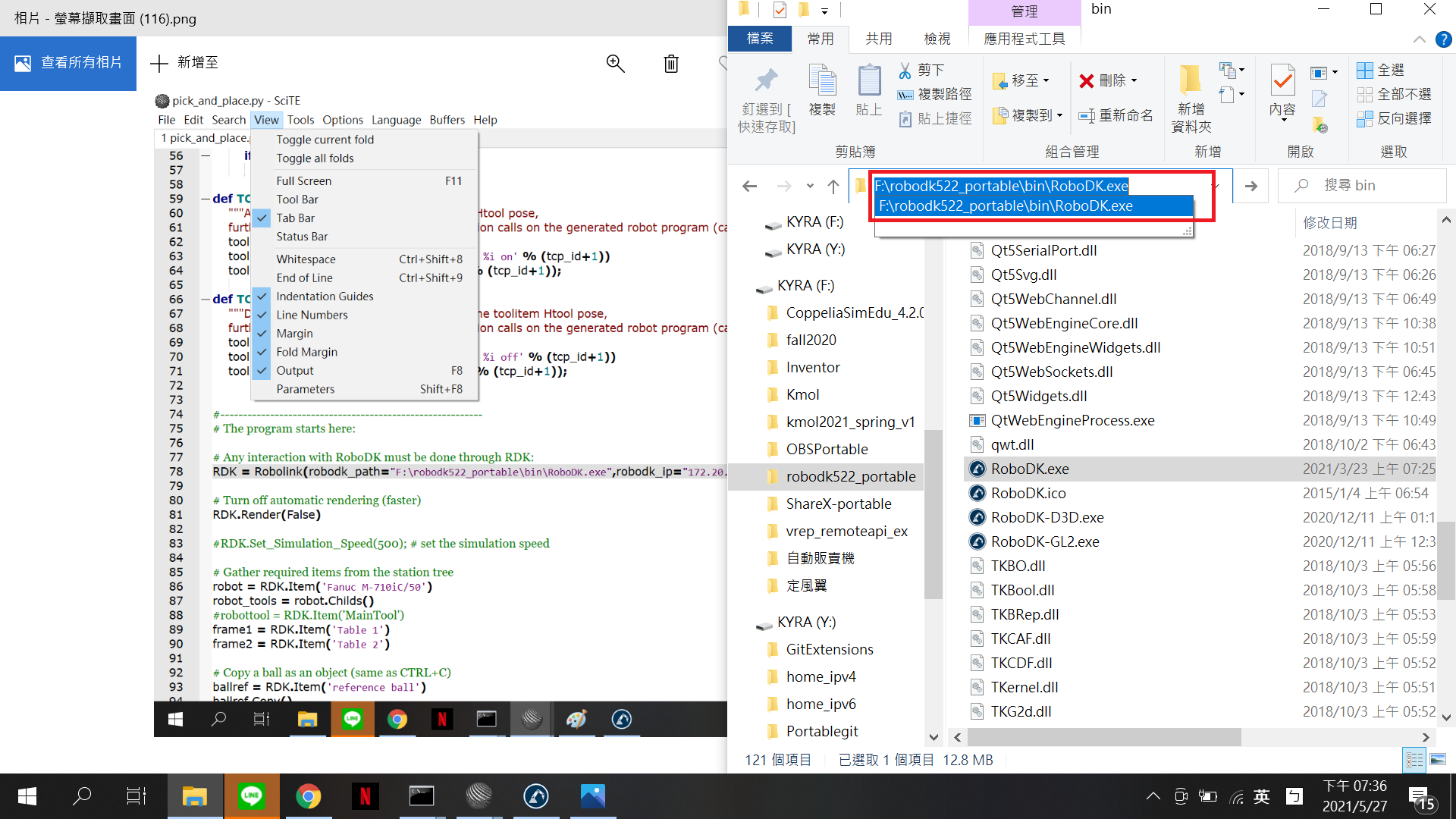
*找RoboDK路徑
找到RoboDK.exe位置
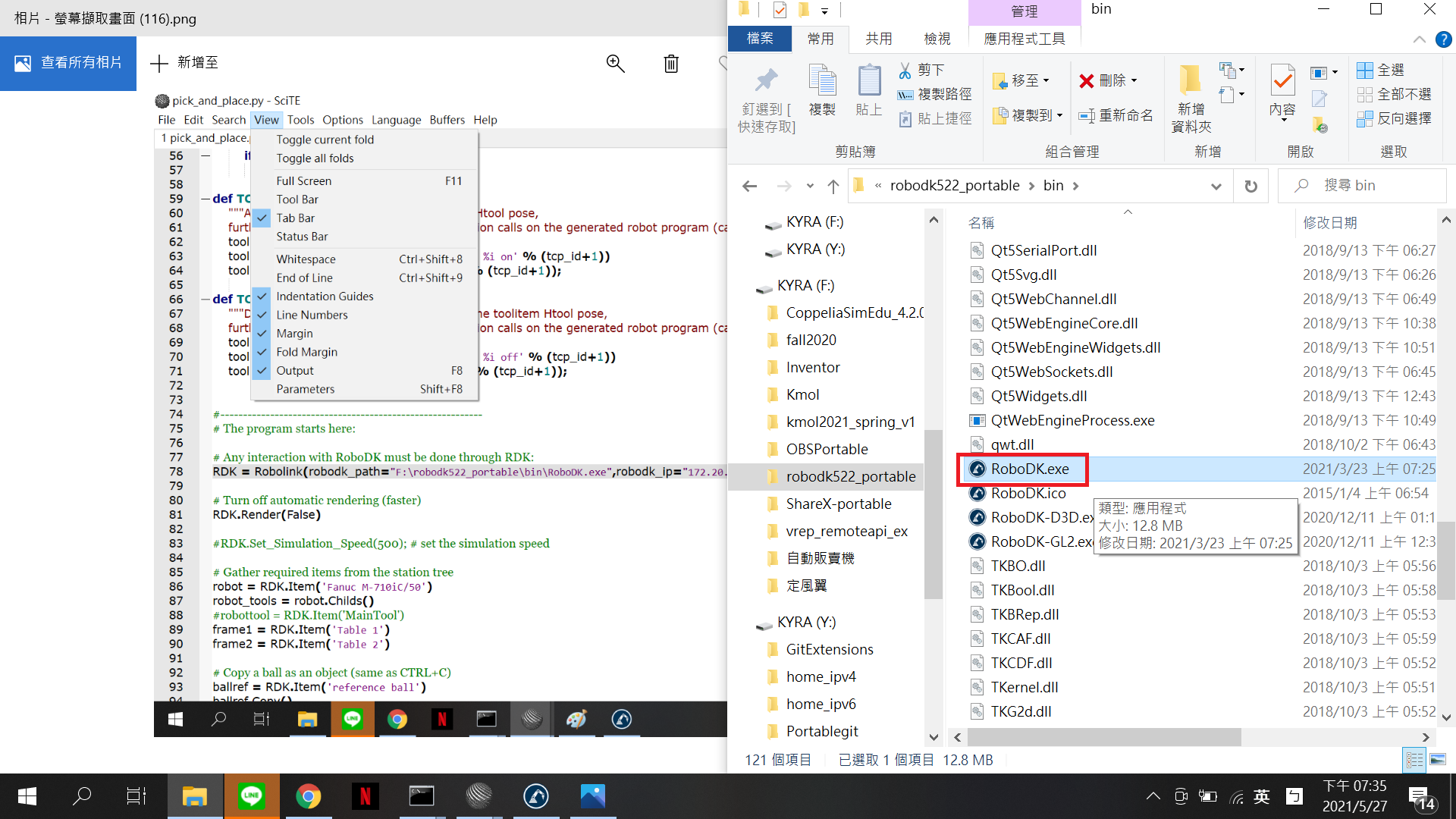
複製上方路徑並回到SciTE貼上
回到RoboDK->工具->選項->Python
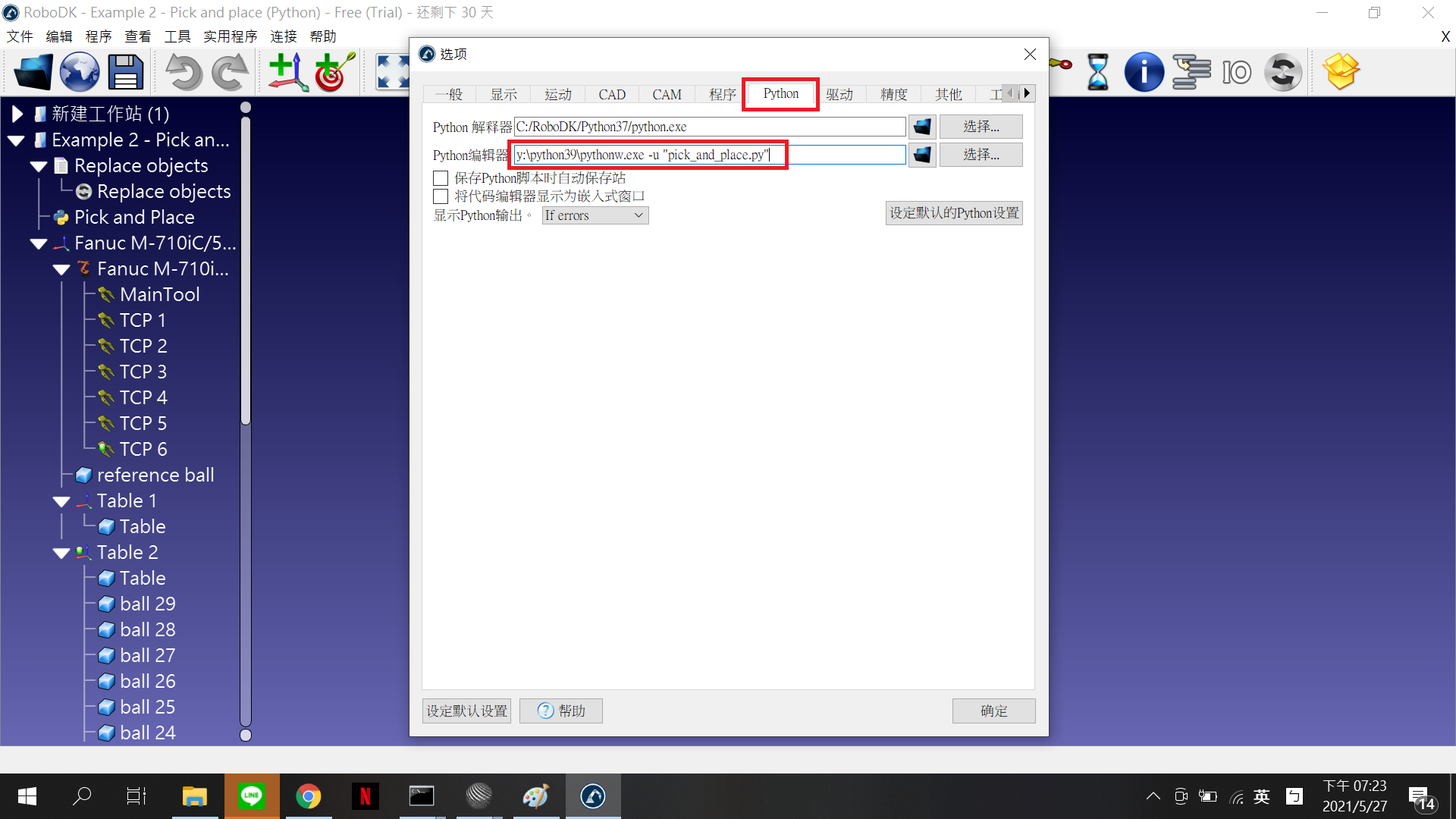
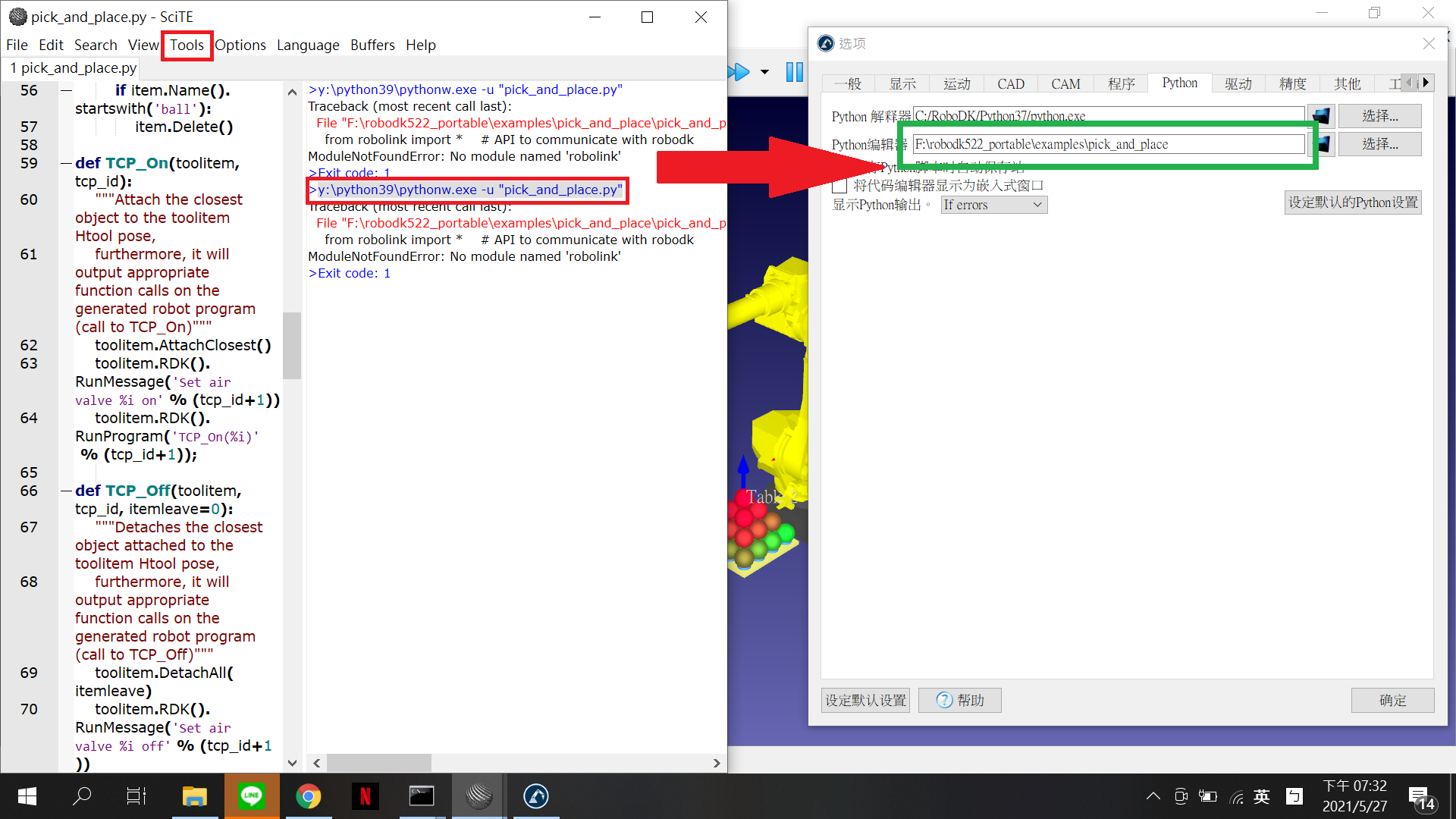
回到SciTE->Tools->Go
將右方欄位的藍色路徑複製,並在RoboDK中貼上(綠色線框選處)->確定
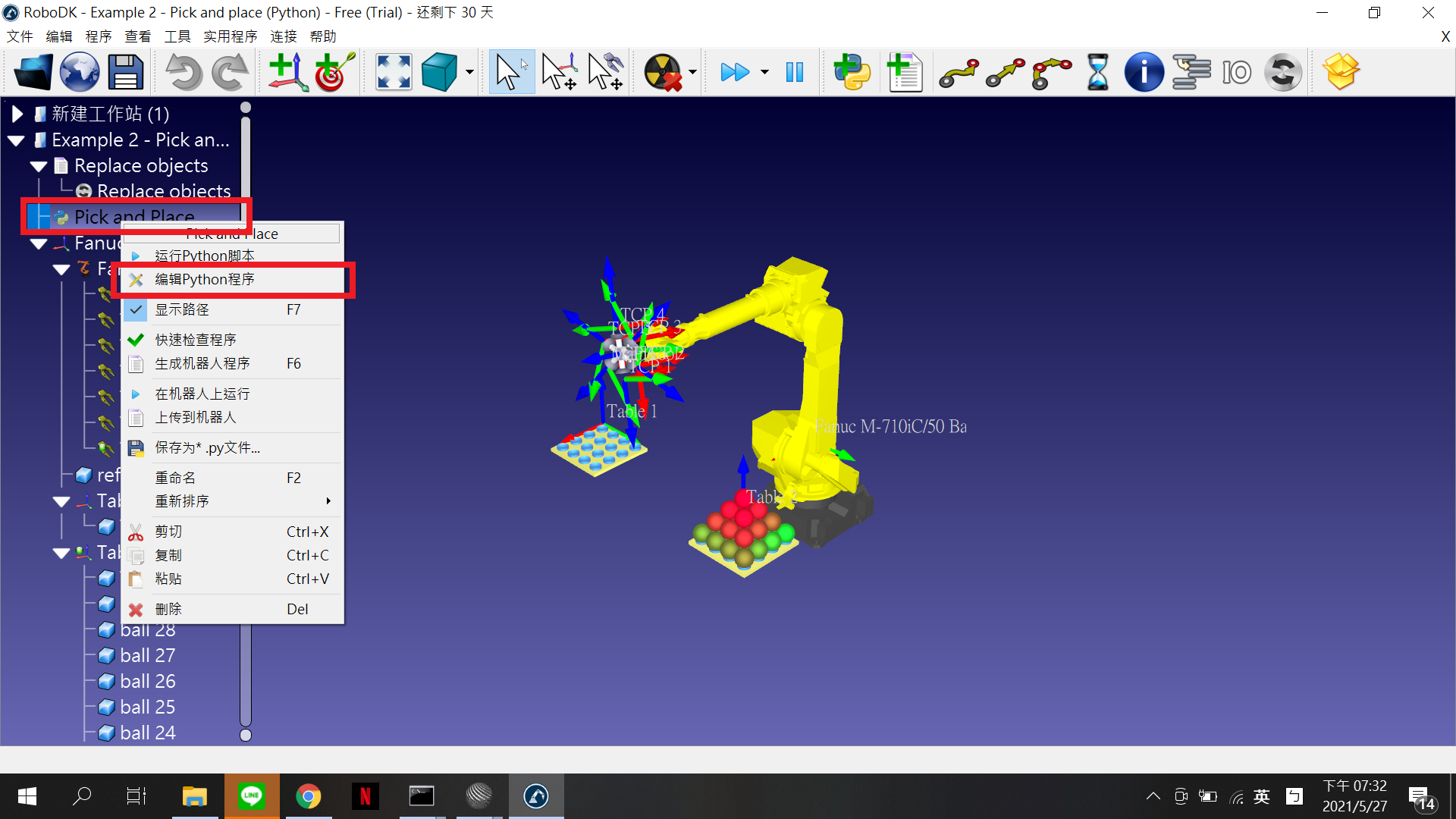
左側上方的Pick and Place點擊左鍵->編輯Python程序 即可作動
bg2-W14&W15進度 <<
Previous Next >> RemoteApi影片